
FDR - kontrol sa dinamika sa pagmamaneho
Inisyal Fahr Dynamik Regelung, isang aktibong sistema ng kaligtasan para sa pagmamaneho ng pagkontrol ng dinamika na binuo ni Bosch sa pakikipagtulungan sa Mercedes, na ngayon ay tinatawag na ESP. Kung kinakailangan, ibinalik nito ang daanan ng sasakyan, awtomatikong namagitan sa preno at accelerator.
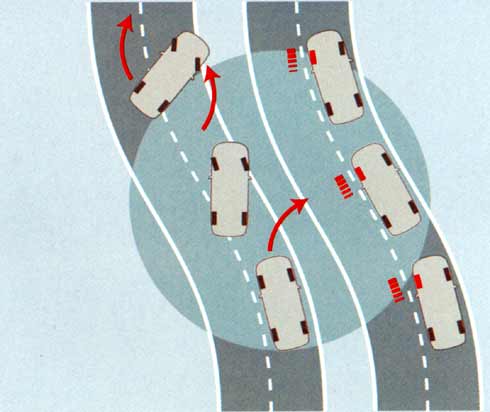
Ginagamit ang FDR upang maiwasan ang skidding at side-skidding, iyon ay, ang mga understeer o oversteer phenomena na nagaganap kapag ang isa o higit pang mga gulong ay nawalan ng lakas, at gayundin, malinaw naman, na-skid dahil sa pagkawala ng katatagan. Ang Dynamic na pagsasaayos ay maaaring epektibo na iwasto ang isang hint ng skid dahil sa pagkawala ng traksyon sa isang gulong, inaayos ang metalikang kuwintas sa iba pang tatlong naaayon. Halimbawa, kung ang kotse ay dumudulas sa front end patungo sa labas ng isang sulok, ibig sabihin, understeer, nakikialam ang FDR sa pamamagitan ng pagpepreno sa loob ng gulong sa likuran upang ihanay ang kotse. Nakita ng system ang pagdulas ng sasakyan salamat sa isang sensor ng yaw rate, na kung saan ay isang "sensor" na may kakayahang makita ang isang laktod sa paligid ng isang patayong axis sa pamamagitan ng sentro ng gravity ng sasakyan.
Bilang karagdagan sa ito, ang FDR ay gumagamit ng isang hanay ng mga sensor na alam ito tungkol sa bilis ng gulong, pag-ilid ng pag-ilid, pag-ikot ng manibela at, sa wakas, ang presyon na inilapat sa mga pedal ng preno at accelerator. (pagkarga ng makina). Upang maiimbak ang lahat ng data na ito sa control unit at magsagawa ng anumang pagkilos na pagwawasto sa isang napakaikling tagal ng panahon, nangangailangan ang FDR ng napakalaking lakas at memorya ng computing. Ang huli ay 48 kilobytes, na kung saan ay apat na beses na higit sa kinakailangan para sa sistema ng ABS, at dalawang beses na mas malaki kaysa sa kinakailangan para sa anti-skid system.
Tingnan din ang ESP.

