
Manu-manong paghahatid - robotic gearbox
nilalaman
Anumang modernong kotse ay hindi maaaring magsimula at gumalaw nang maayos kung walang paghahatid sa aparato nito. Ngayon, mayroong isang iba't ibang mga uri ng lahat ng mga uri ng mga gearbox, na hindi lamang pinapayagan ang driver na pumili ng pagpipilian na nababagay sa kanyang mga kakayahan sa pananalapi, ngunit ginagawang posible upang makakuha ng maximum na ginhawa mula sa pagmamaneho ng isang sasakyan.
Maikling tungkol sa pangunahing mga uri ng paghahatid ay inilarawan sa hiwalay na pagsusuri... Ngayon pag-usapan natin nang mas detalyado tungkol sa kung ano ang isang robotic gearbox, ang mga pangunahing pagkakaiba mula sa isang manu-manong gearbox, at isaalang-alang din ang prinsipyo ng pagpapatakbo ng yunit na ito.
Ano ang isang robotic gearbox
Ang pagpapatakbo ng gearbox ay halos magkapareho sa mekanikal na analogue na may pagbubukod sa ilang mga tampok. Ang aparato ng robot ay may kasamang maraming mga bahagi na bumubuo sa mekanikal na bersyon ng kahon na pamilyar sa lahat. Ang pangunahing pagkakaiba sa pagitan ng robotic ay ang kontrol nito ay isang uri ng microprocessor. Sa ganitong mga gearbox, ang paglilipat ng gear ay ginaganap ng mga electronics batay sa data mula sa mga sensor ng engine, gas pedal at gulong.

Ang isang robotic box ay maaari ding tawaging isang awtomatikong makina, ngunit ito ay isang maling pangalan. Ang katotohanan ay ang awtomatikong paghahatid ay madalas na ginagamit bilang isang pangkalahatang konsepto. Kaya, ang parehong variator ay may isang awtomatikong mode para sa paglipat ng mga ratio ng gear, kaya para sa ilan ito ay awtomatiko din. Sa katunayan, sa mga tuntunin ng istraktura at prinsipyo ng pagpapatakbo, ang robot ay mas malapit sa isang kahon ng makina.
Sa panlabas, imposibleng makilala ang isang manu-manong paghahatid mula sa isang awtomatikong paghahatid, dahil maaaring mayroon silang magkaparehong tagapili at katawan. Maaari mong suriin ang paghahatid lamang habang ang sasakyan ay nagmamaneho. Ang bawat uri ng yunit ay may sariling katangian ng trabaho.
Ang pangunahing layunin ng isang robotic na paghahatid ay upang gawing madali ang pagmamaneho hangga't maaari. Ang driver ay hindi kailangang lumipat ng mga gears sa kanyang sarili - ang gawaing ito ay ginagawa ng control unit. Bilang karagdagan sa ginhawa, ang mga awtomatikong tagagawa ng paghahatid ay nagsusumikap na gawing mas mura ang kanilang mga produkto. Ngayon, ang robot ay ang pinaka-badyetong uri ng gearbox pagkatapos ng mekanika, ngunit hindi ito nagbibigay ng kaginhawaan sa pagmamaneho bilang isang variator o awtomatiko.
Ang prinsipyo ng isang robotic gearbox
Ang robotic transmission ay maaaring lumipat sa susunod na bilis alinman sa awtomatiko o semi-awtomatikong. Sa unang kaso, ang unit ng microprocessor ay tumatanggap ng mga signal mula sa mga sensor, batay sa batayan kung saan ang programang algorithm na na-program ng tagagawa ay napalitaw.
Karamihan sa mga gearbox ay nilagyan ng isang manu-manong tagapili. Sa kasong ito, awtomatiko pa ring magbubukas ang mga bilis. Ang tanging bagay ay ang driver ay maaaring malayang magsenyas ng sandali ng paglipat sa isang pataas o pababang gear. Ang ilang mga awtomatikong pagpapadala ng uri ng Tiptronic ay may katulad na prinsipyo.
Upang madagdagan o mabawasan ang bilis, igagalaw ng driver ang selector lever patungo sa + o patungo sa -. Salamat sa pagpipiliang ito, ang ilang mga tao ay tumatawag sa sunud-sunod o sunud-sunod na paghahatid na ito.
Gumagana ang robotic box ayon sa sumusunod na pamamaraan:
- Inilapat ng drayber ang preno, sinisimulan ang makina at inililipat ang driver mode switch lever sa posisyon D;
- Ang signal mula sa unit ay papunta sa unit ng control box;
- Depende sa napiling mode, pinapagana ng control unit ang naaangkop na algorithm alinsunod sa kung saan gagana ang unit;
- Sa proseso ng paggalaw, ang mga sensor ay nagpapadala ng mga signal sa "utak ng robot" tungkol sa bilis ng sasakyan, tungkol sa pagkarga ng yunit ng kuryente, pati na rin tungkol sa kasalukuyang mode ng gearbox;
- Kaagad na tumigil ang mga tagapagpahiwatig na tumutugma sa program na naka-install mula sa pabrika, binibigyan ng control unit ang utos na baguhin sa isa pang gear. Maaari itong alinman sa isang pagtaas o pagbaba ng bilis.
Kapag ang isang drayber ay nagmamaneho ng isang kotse na may mekanika, dapat niyang pakiramdam ang kanyang sasakyan upang matukoy ang sandali kung kailan lumipat sa ibang bilis. Sa isang robotic analogue, nagaganap ang isang katulad na proseso, ang drayber lamang ang hindi kailangang mag-isip tungkol sa kung kailan ilipat ang shift lever sa nais na posisyon. Sa halip, ginagawa ito ng microprocessor.
Sinusubaybayan ng system ang lahat ng impormasyon mula sa lahat ng mga sensor at pipiliin ang pinakamainam na gamit para sa isang tukoy na karga. Upang paganahin ang electronics na baguhin ang mga gears, ang paghahatid ay mayroong hydromekanical actuator. Sa isang mas karaniwang bersyon, sa halip na hydromekanika, naka-install ang isang electric drive o isang servo drive, na nagkokonekta / nagdidiskonekta ng klats sa kahon (sa pamamagitan ng paraan, mayroon itong ilang pagkakapareho sa awtomatikong gearbox - ang klats ay matatagpuan hindi kung saan ito nasa manu-manong paghahatid, katulad malapit sa flywheel, ngunit sa mismong pabahay. paghahatid).
Kapag ang control unit ay nagbibigay ng isang senyas na oras na upang lumipat sa isa pang bilis, ang unang electric (o hydromekanical) servo drive ay una nang naisasaaktibo. Pinahihiwalay nito ang mga ibabaw ng klats ng alitan. Pagkatapos ay ilipat ng pangalawang servo ang mga gears sa mekanismo sa nais na posisyon. Pagkatapos ang unti unting dahan-dahang naglalabas ng klats. Pinapayagan ng disenyo na ito ang mekanismo na gumana nang walang paglahok ng driver; samakatuwid, ang isang makina na may isang robotic na paghahatid ay walang isang clutch pedal.

Maraming mga kahon ng tagapili ay pinilit ang mga posisyon sa gear. Ang tinaguriang tiptronic na ito ay nagbibigay-daan sa driver na malayang kontrolin ang sandali ng paglipat sa isang mas mataas o mas mababang bilis.
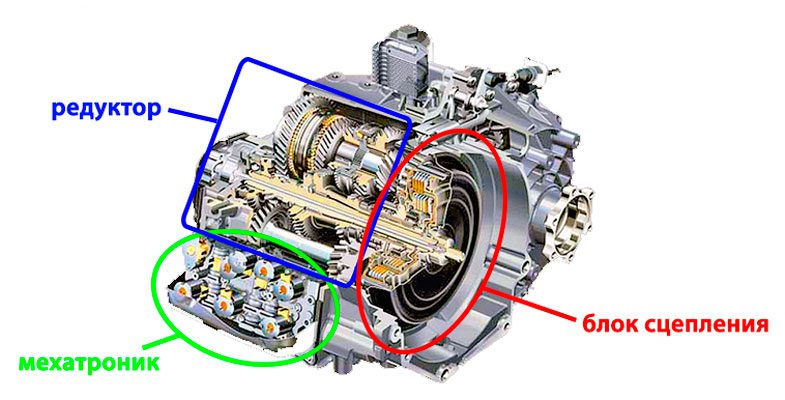
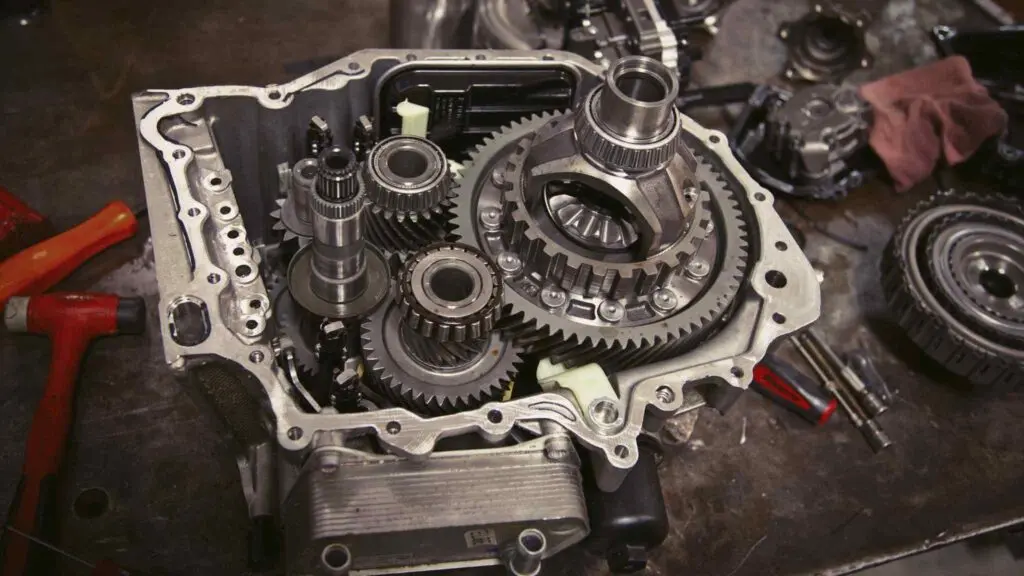
Robotic na aparato ng gearbox
Ngayon, maraming uri ng robotic transmissions para sa mga pampasaherong kotse. Maaari silang magkakaiba sa bawat isa sa ilang mga elemento ng pag-aktibo, ngunit ang mga pangunahing bahagi ay mananatiling magkapareho.
Narito ang mga node na kasama sa gearbox:
- Klats. Nakasalalay sa tagagawa at pagbabago ng yunit, maaari itong maging isang bahagi na may ibabaw ng alitan o maraming mga katulad na disc. Kadalasan, ang mga elementong ito ay matatagpuan sa coolant, na nagpapatatag ng pagpapatakbo ng yunit, na pinipigilan ang sobrang pag-init. Ang preselective o dobleng pagpipilian ay itinuturing na mas epektibo. Sa pagbabago na ito, habang ang isang gear ay nakatuon, ang pangalawang hanay ay naghahanda upang i-on ang susunod na bilis.
- Ang pangunahing bahagi ay isang maginoo na kahon ng mekanikal. Gumagamit ang bawat tagagawa ng iba't ibang mga pagmamay-ari na disenyo. Halimbawa, ang isang robot mula sa tatak ng Mercedes (Speedshift) ay panloob na isang 7G-Tronic na awtomatikong paghahatid. Ang pagkakaiba lamang sa pagitan ng mga yunit ay sa halip na isang converter ng metalikang kuwintas, isang klats na may maraming mga disc ng alitan ang ginagamit. Ang BMW ay may katulad na diskarte. Ang SMG gearbox nito ay batay sa isang anim na bilis na manual na gearbox.
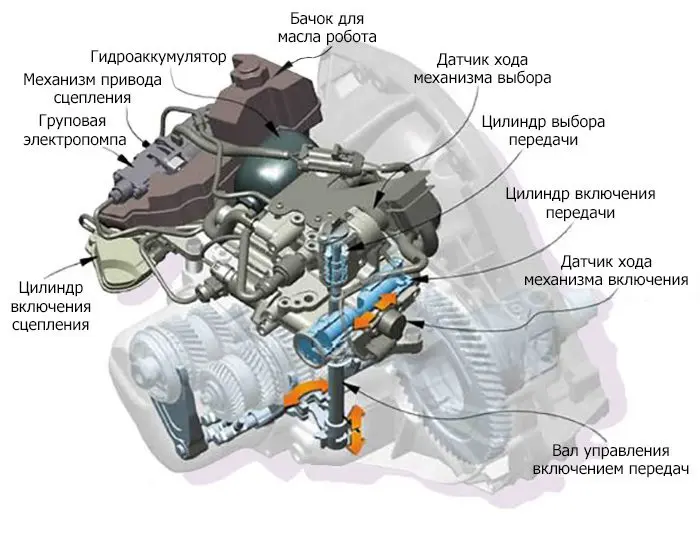
- Clutch at transmission drive. Mayroong dalawang mga pagpipilian - na may isang electric drive o isang hydromekanikal na analogue. Sa unang kaso, ang klats ay kinatas ng isang de-kuryenteng motor, at sa pangalawa - ng mga haydrolang silindro na may mga balbula ng EM. Ang electric drive ay gumagana nang mas mabagal kaysa sa mga haydrolika, ngunit hindi ito nangangailangan ng pagpapanatili ng patuloy na presyon sa linya, na kung saan gumana ang uri ng electro-hydraulic. Ang isang haydroliko robot, sa kabilang banda, ay lumilipat sa susunod na yugto ng mas mabilis (0,05 segundo kumpara sa 0,5 segundo para sa isang electric analogue). Ang isang de-kuryenteng kahon ng kahon ay pangunahin na naka-install sa mga badyet na kotse, at isang hydromekanikal na gearbox ay naka-install sa mga premium na sports car, dahil ang bilis ng gearshift ay napakahalaga sa kanila nang hindi nagagambala ang supply ng kuryente sa shaft ng drive.

- Sensor Maraming mga naturang bahagi sa robot. Sinusubaybayan nila ang maraming magkakaibang mga parameter ng paghahatid, halimbawa, ang posisyon ng mga tinidor, ang mga rebolusyon ng mga input at output shaft, kung saan ang posisyon ang lock ng selector ay naka-lock, ang temperatura ng coolant, atbp. Ang lahat ng impormasyong ito ay ibinibigay sa aparato ng pagkontrol ng mekanismo.
- Ang ECU ay isang yunit ng microprocessor, kung saan nai-program ang iba't ibang mga algorithm na may iba't ibang mga tagapagpahiwatig na nagmumula sa mga sensor. Ang yunit na ito ay konektado sa pangunahing yunit ng kontrol (mula roon ang data sa pagpapatakbo ng engine), pati na rin sa mga electronic wheel locking system (ABS o ESP).
- Mga Actuator - haydroliko na mga silindro o mga de-kuryenteng motor, depende sa pagbabago ng kahon.
Ang mga pagtutukoy ng gawain ng RKPP
Upang maayos na makapagsimula ang sasakyan, dapat gamitin ng drayber nang tama ang clutch pedal. Matapos niyang isama ang una o baligtad na gamit, kailangan niyang maayos na bitawan ang pedal. Kapag ang drayber ay may pakiramdam para sa pakikipag-ugnayan ng mga disc, sa paglabas niya ng pedal, maaari siyang magdagdag ng mga rev sa engine upang ang kotse ay hindi tumigil. Ganito gumagana ang mekaniko.
Ang isang magkaparehong proseso ay nangyayari sa robotic counterpart. Sa kasong ito lamang ang isang mahusay na kasanayan ay hindi kinakailangan mula sa driver. Kailangan lamang niyang ilipat ang switch ng kahon sa naaangkop na posisyon. Ang kotse ay magsisimulang ilipat alinsunod sa mga setting ng control unit.

Ang pinakasimpleng pagbabago ng solong-klats ay gumagana tulad ng mga klasikong mekanika. Gayunpaman, sa parehong oras, ang pagkakaroon ng isang problema ay sinusunod - ang electronics ay hindi naitala ang puna mula sa klats. Kung ang isang tao ay maaaring matukoy kung gaano maayos na kinakailangan upang palabasin ang pedal sa isang partikular na kaso, kung gayon ang awtomatiko ay gumagana nang mas matibay, kaya't ang paggalaw ng kotse ay sinamahan ng mga nasasalat na jerks.
Lalo na ito ay nadarama sa mga pagbabago na may isang electric drive ng mga actuator - habang ang gear ay nagbabago, ang klats ay nasa isang bukas na estado. Mangangahulugan ito ng isang pahinga sa daloy ng metalikang kuwintas, dahil sa kung saan ang kotse ay nagsimulang mabagal. Dahil ang bilis ng pag-ikot ng mga gulong ay hindi gaanong naaayon sa nakatuon na gear, isang bahagyang haltak ang nangyayari.
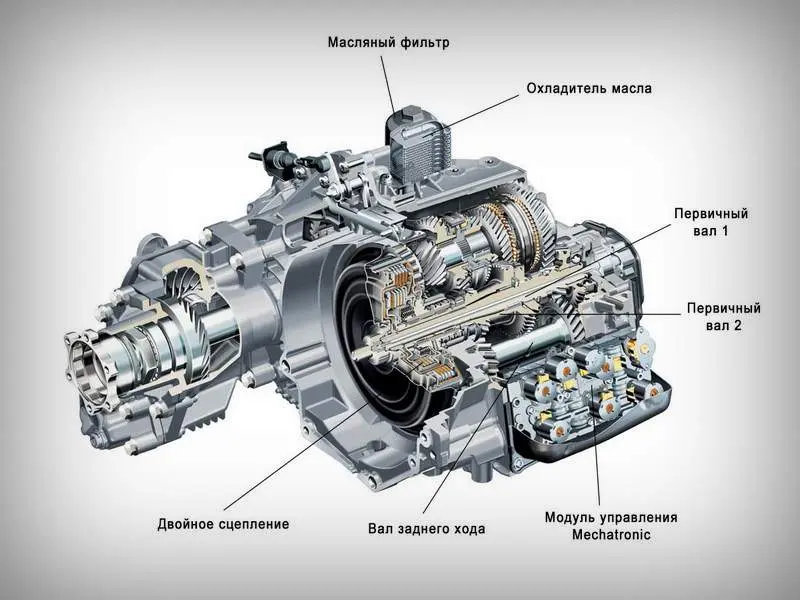
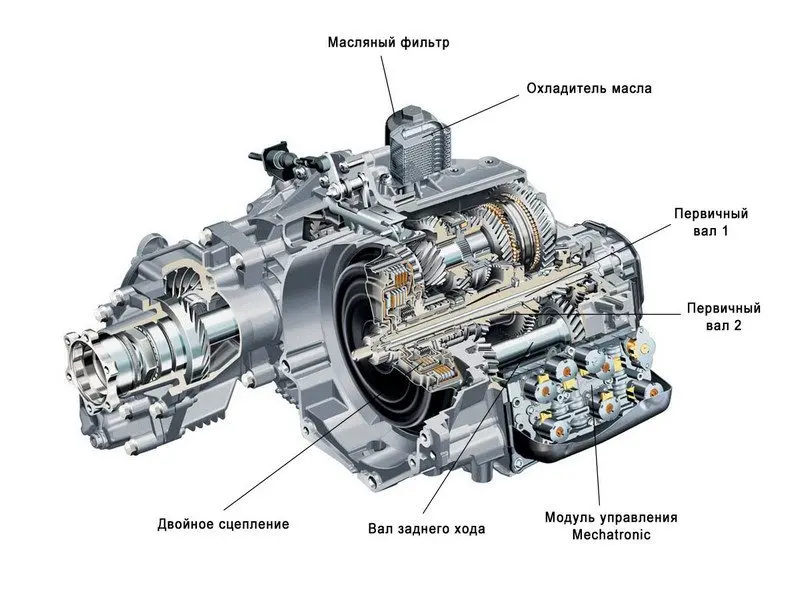
Ang isang makabagong solusyon sa problemang ito ay ang pagbuo ng isang pagbabago sa doble-klats. Ang isang kapansin-pansin na kinatawan ng naturang paghahatid ay ang Volkswagen DSG. Tingnan natin nang mas malapit ang mga tampok nito.
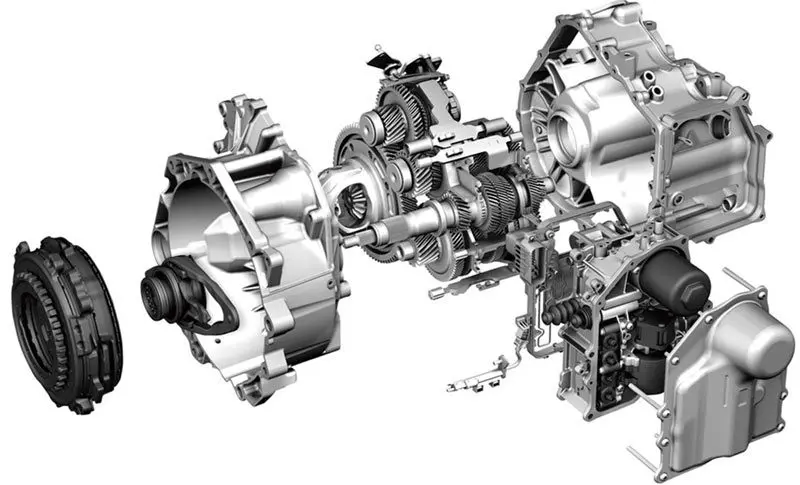
Mga tampok ng DSG robotic gearbox
Ang pagpapaikli ay nangangahulugang direktang shift gearbox. Sa katunayan, ito ang dalawang mga kahon ng mekanikal na naka-install sa isang pabahay, ngunit may isang koneksyon na tumuturo sa tsasis ng makina. Ang bawat mekanismo ay may sariling klats.
Ang pangunahing tampok ng pagbabago na ito ay ang preselective mode. Iyon ay, habang ang unang baras ay tumatakbo kasama ang gear na nakatuon, ang electronics ay nag-uugnay na sa mga kaukulang gears (kapag nagpapabilis upang madagdagan ang gear, kapag nagpapahina ng mas mababa) ng pangalawang baras. Kinakailangan lamang ng pangunahing actuator na idiskonekta ang isang klats at kumonekta sa isa pa. Sa lalong madaling matanggap ang isang senyas mula sa control unit upang lumipat sa isa pang yugto, ang gumaganang klats ay binuksan, at ang pangalawa na may mga gear na naka-meshed ay agad na konektado.
Pinapayagan ka ng disenyo na ito na sumakay nang walang malakas na jerks kapag nagpapabilis. Ang unang pag-unlad ng isang preselective na pagbabago ay lumitaw noong dekada 80 ng huling siglo. Totoo, pagkatapos ang mga robot na may dobleng klats ay na-install sa rally at karera ng kotse kung saan ang bilis at kawastuhan ng paglilipat ng gear ay napakahalaga.
Kung ihinahambing namin ang kahon ng DSG sa isang klasikong awtomatiko, kung gayon ang unang pagpipilian ay may higit na mga kalamangan. Una, dahil sa mas pamilyar na istraktura ng mga pangunahing elemento (ang tagagawa ay maaaring kumuha ng anumang handa na mekanikal na analogue bilang batayan), ang naturang kahon ay magiging mas mura sa pagbebenta. Ang parehong kadahilanan ay nakakaapekto sa pagpapanatili ng yunit - ang mekanika ay mas maaasahan at mas madaling ayusin.
Pinagana nito ang tagagawa na mag-install ng mga makabagong pagpapadala sa mga modelo ng badyet ng kanilang mga produkto. Pangalawa, maraming mga may-ari ng mga sasakyan na may tulad na isang gearbox ang nagtatala ng isang pagtaas sa kahusayan ng kotse kumpara sa isang magkatulad na modelo, ngunit may ibang gearbox.
Ang mga inhinyero ng pag-aalala ng VAG ay nakabuo ng dalawang variant ng paghahatid ng DSG. Ang isa sa mga ito ay may label na 6, at ang isa ay 7, na tumutugma sa bilang ng mga hakbang sa kahon. Gayundin, ang isang anim na bilis na awtomatikong gumagamit ng basang klats, at ang isang pitong bilis na analogue ay gumagamit ng isang dry clutch. Sa mas detalyado tungkol sa mga kalamangan at kahinaan ng kahon ng DSG, pati na rin kung paano iba ang modelo ng DSG 6 mula sa ikapitong pagbabago, ay inilarawan sa hiwalay na artikulo.
Mga kalamangan at disadvantages
Ang isinasaalang-alang na uri ng paghahatid ay may parehong positibo at negatibong panig. Kabilang sa mga pakinabang ng kahon ang:
- Ang nasabing paghahatid ay maaaring gamitin kasabay ng isang yunit ng kuryente ng halos anumang lakas;
- Kung ikukumpara sa isang variator at isang awtomatikong makina, ang robotic na bersyon ay mas mura, kahit na ito ay isang makabagong pag-unlad;
- Ang mga robot ay mas maaasahan kaysa sa iba pang mga awtomatikong pagpapadala;
- Dahil sa panloob na pagkakatulad sa mekanika, mas madaling makahanap ng isang dalubhasa na kukuha ng pagkumpuni ng yunit;
- Ang mas mahusay na paglilipat ng gear ay nagbibigay-daan sa paggamit ng lakas ng engine nang walang isang kritikal na pagtaas sa pagkonsumo ng gasolina;
- Sa pamamagitan ng pagpapabuti ng kahusayan, ang makina ay naglalabas ng hindi gaanong nakakapinsalang mga sangkap sa kapaligiran.
Sa kabila ng malinaw na mga pakinabang kaysa sa iba pang mga awtomatikong pagpapadala, ang robot ay may maraming mga makabuluhang kawalan:
- Kung ang kotse ay nilagyan ng isang solong-disk robot, kung gayon ang paglalakbay sa naturang transportasyon ay hindi matatawag na komportable. Kapag nagpapalit ng mga gears, magkakaroon ng mga mahihirap na jerks, na parang biglang itinapon ng driver ang clutch pedal sa mga mekaniko.
- Kadalasan, nabigo ang klats sa yunit (hindi gaanong kinis ng pakikipag-ugnayan) at mga actuator. Pinaghihirapan nito ang pag-aayos ng mga pagpapadala, dahil mayroon silang isang maliit na mapagkukunan sa pagtatrabaho (mga 100 libong kilometro). Ang servos ay bihirang maayos at ang mga bagong mekanismo ay mahal.
- Tulad ng para sa klats, ang mapagkukunan ng disc ay napakaliit din - halos 60 libo. Bukod dito, humigit-kumulang sa kalahati ng mapagkukunan kinakailangan upang isakatuparan ang "koneksyon" ng kahon sa ilalim ng kundisyon ng ibabaw ng alitan ng mga bahagi.
- Kung pinag-uusapan natin ang tungkol sa preselective na pagbabago ng DSG, pagkatapos ay napatunayan na mas maaasahan ito dahil sa mas kaunting oras para sa bilis ng paglipat (salamat dito, ang kotse ay hindi masyadong nagpapabagal). Sa kabila nito, ang pagdirikit ay naghihirap pa rin sa kanila.
Isinasaalang-alang ang mga nakalistang kadahilanan, maaari nating tapusin na hanggang sa pagiging maaasahan at buhay sa pagtatrabaho ay nababahala, ang mga mekaniko ay wala pang pantay. Kung ang diin ay nakalagay sa maximum na ginhawa, kung gayon mas mabuti na pumili ng isang variator (ano ang kakaibang katangian nito, basahin dito). Dapat tandaan na ang naturang paghahatid ay hindi magbibigay ng isang pagkakataon upang makatipid ng gasolina.
Bilang konklusyon, nag-aalok kami ng isang maikling paghahambing ng video ng mga pangunahing uri ng pagpapadala - ang kanilang mga kalamangan at kahinaan:

Mga Tanong at Sagot:
Ano ang pagkakaiba sa pagitan ng isang automat at isang robot? Gumagana ang awtomatikong paghahatid dahil sa torque converter (walang matibay na pagkabit sa flywheel sa pamamagitan ng clutch), at ang robot ay isang analogue ng mekanika, ang mga bilis lamang ang awtomatikong inililipat.
Paano maglipat ng mga gears sa isang robot box? Ang prinsipyo ng pagmamaneho ng isang robot ay magkapareho sa pagmamaneho ng isang awtomatikong makina: ang nais na mode ay pinili sa tagapili, at ang bilis ng engine ay kinokontrol ng pedal ng gas. Awtomatikong magbabago ang bilis.
Ilan ang mga pedal sa isang kotse na may robot? Bagama't ang robot ay katulad ng istruktura sa mekanika, ang clutch ay awtomatikong humihiwalay sa flywheel, kaya ang isang kotse na may robotic transmission ay may dalawang pedal (gas at preno).
Paano maayos na iparada ang kotse gamit ang isang robot box? Ang European model ay dapat na naka-park sa A mode o sa reverse gear. Kung ang kotse ay Amerikano, kung gayon ang tagapili ay may R mode.
Isang komento
David
Hello, kailangan ko ng tulong, 203 coupe ang napunta sa emergency mode, ano ang maaari kong gawin?